

自動車の自動運転と聞くと、何を思い浮かべるでしょうか?
「早く完全自動運転が実現しないかな~」とか「高速道路で運転支援機能は使っているけど、ハンドルを握らないといけなくて面倒くさい」とか「ホンダがレベル3を実現したらしい」とか「テスラのFSD(フルセルフドライビング)が凄いらしい」とか、人によって様々だと思います。
今回は、そんな自動運転について、深掘っていきたいと思います。
自動運転のレベル
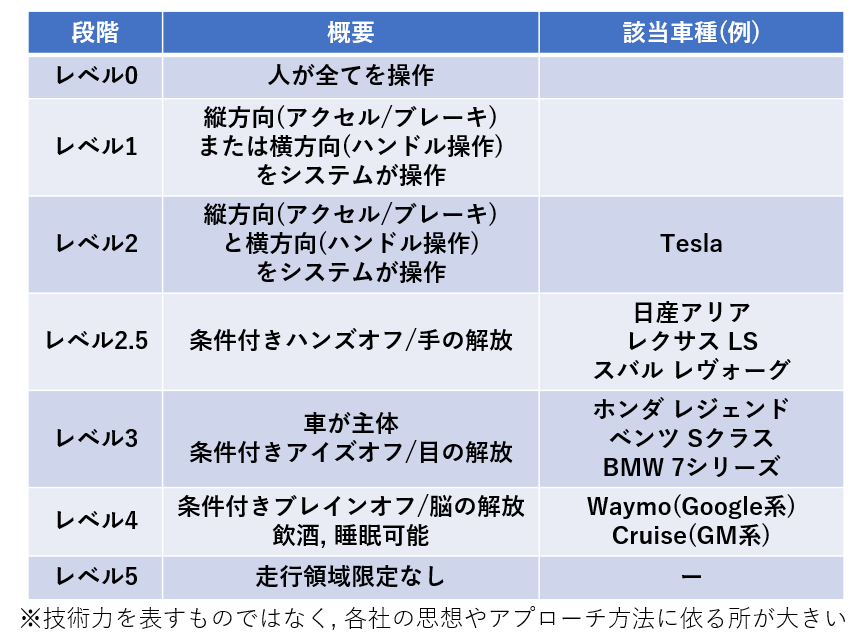
まず、自動運転にはSAE(Society of Automotive Engineers:米国自動車技術会)が定めたレベル0~5までの段階があります。
「自動運転」と言いましたが、正確には「運転自動化」のレベルです。
数字が大きくなるほど、自動化が進んでいることを表しています。
それぞれ見ていきましょう。

まず、レベル0。これは運転自動化なしの従来の車のシステムで、運転手がアクセル/ブレーキ、ハンドル、全てを操作します。
次に、レベル1。これは運転支援に当たり、車の縦方向(アクセル/ブレーキ)または横方向(ハンドル操作)のどちらかをシステムが支援します。縦方向支援の例で言うと、速度維持機能や前車追従機能などで、横方向支援の例で言うと、車線逸脱防止機能やレーントレース機能などです。この縦方向と横方向のいずれか一つだけを支援するのがレベル1です。
次に、レベル2。これは部分運転自動化です。上述した縦方向の支援と横方向の支援の両方を合わせたものです。例えば、高速道路で、最高速度100km/hでレーントレースして、前車が遅ければ一定の車間距離で追従する(ただし運転手はハンドルに触れて周囲を監視する必要がある)、というシステムはレベル2に当たります。
このレベル2の発展版で、レベル2.5という分類が便宜的に用いられています。これはSAEで定義されたものではありませんが、レベル2のシステムが実現された上に、ハンドルから手を放しても問題ないとされるシステムです。周囲を監視する必要はあり、直ちに運転に復帰できる状態の必要はありますが、手が解放されるので、身体的に疲れにくい利点があります。
次に、レベル3。これは条件付運転自動化です。このレベルから、運転の主体が運転手ではなく、車に移ります。システム作動中、運転手は前方から目を逸らしてもよくなります。この環境下では、ディスプレイで動画を鑑賞することも可能です。ただ、システムが継続困難になった場合は、運転手が運転を引き継ぐ必要があるため、飲酒や睡眠はできません。
次に、レベル4。これは高度運転自動化です。このレベルからは、運転手が存在せず、全てシステム側で発進から停止までを行ってくれます。ですので、従来の運転席に座っていても、飲酒や睡眠が可能です。ただし、レベル4では、走行可能領域が限られており、どこへでも行けるという訳ではありません。
最後に、レベル5。これは完全運転自動化です。レベル4の走行領域の限定が取り払われたものがレベル5です。出発地と目的地がどこであっても、全て車が連れて行ってくれます。このレベルでは、アクセル・ブレーキ・ハンドルが全く必要ありません。
各社の市販車到達レベル
それでは、各社の自動運転/運転支援システムはどのレベルに該当するのでしょうか?
まず、最もレベルの高いレベル5を達成しているシステムはまだ存在しません。
レベル4のシステムとしては、カリフォルニア州で自動運転タクシーを運行しているWaymo(Google系)やCruise(GM系)が挙げられます。特定のエリア内ではありますが、スマホアプリでタクシーを呼ぶと誰も乗っていないタクシーが目の前にやってきて、エリア内の目的地まで連れて行ってくれます。
レベル3のシステムとしては、ホンダ レジェンドの「トラフィックジャムパイロット」が実用化されています。これは高速道路で30km/h以下の速度で前後に車がいる渋滞の状態でのみ作動しますが、作動中は前方から目線を外しても問題ありません。また、ベンツやBMWもレベル3の導入を進めているようです。
レベル2.5のシステムを導入しているメーカーはいくつもあり、日産アリア、レクサスLS、スバルレヴォーグ等でハンズオフの運転が可能です。ウィンカーを出せば車線変更を行ってくれる車種もあり、高速道路の合流後から離脱まで料金所以外ほぼ全てを任せられるといっても良いかもしれません。
レベル2のシステムを導入しているメーカーは大量にありますが、意外にもTeslaのシステムはレベル2で、ハンズオフができません。この理由については、後述します。
ジオメトリ式とビジョン式
Teslaの運転自動化レベルがレベル2に留まっていることにも関係するのですが、自動運転の方式にはジオメトリ式とビジョン式があります。正確には、自動運転の「認知」に関する方式なのですが、大枠を掴むために敢えて自動運転システム全体の分類として取り上げています。

まず、ジオメトリ式というのは、ざっくり言うと、超高性能な「目」を持ち、人間から言われた通りに動く自動運転システムです。
運転する地域の高精細な3Dマップを用意しておく必要があり、そのデータとLiDAR・ミリ波レーダー・カメラなどから得た周辺情報を照合して、自己位置や周辺の車・障害物を認識します。
そして、それらの情報を基に状況を判断して経路を生成するのですが、その時には人間が予め入力しておいたルールに従って、決定を下します。
このシステムは高精細3Dマップが必要なので、走行できるエリアは必然的に限られます。
また、非常に高価格なLiDARを必要とするため、車両価格も高くなってしまいます。
一方で、人間入力したルールを基に走行するため、自動運転の許可を取りやすい性質があるのではないかと思います。
次に、ビジョン式です。これはTeslaで用いられている方式に近いのですが、ざっくり言うと、人間と似たような「目」を持ち、人間と同様に「経験」や「常識」を基に判断して動く自動運転システムです。
ジオメトリ式のように高精細3Dマップを必要とせず、高価なLiDARも必要ありません。カメラのみで周囲を捉えて、自分から「見える」ものをベースに判断を行って動きます。
状況判断・経路生成に用いるのは、学習データから得た「経験」や人間なら誰でも分かる「常識」です。
高精細3Dマップを必要としないので、人間が運転しても行ける場所なら、どこでも行くことが可能で、高価なLiDARが不要のため、車両価格も低く設定できます。
ただ、開発者がルールを決めている訳ではないため、安全性の証明が難しく、自動運転の許可を取得しにくいのではないかと思います。
ただ、走行領域の自由度や価格設定から見て、レベル5の完全自動運転に最も近いのはこのビジョン方式ではないかと思います。
ビジョン式のレベル5までの勝ち筋
最後に、ビジョン式がレベル5の自動運転を達成するまでの道筋について、考えてみます。
まず、現状について整理しておくと、TeslaはアメリカでFSD(フルセルフドライビング:レベル2)を実用化しており、これは、任意の場所から任意の目的地まで、一般道・高速道路を用い全自動で移動可能なシステムです。ただ、レベル2のシステムである以上、ハンドルに手を添えて監視する必要はあります。
ここから、レベル5まで到達するためには、最低限の条件として、加害事故を起こさない安全性が求められます。
そのためには、以下の3点を行わなければならないと思います。
①加害事故を起こさないシステムになるよう改良を続ける。
②FSD作動時の運転手介入率が極めて低いことを示す。
③全ての運転手介入場面に対して, 介入無しでも安全に走行できたことを示す。
これらを繰り返していけば、FSDは加害事故を起こさないシステムであることを証明でき、いずれレベル5の許可が下りるのではないかと思います。
そうなる日が早く来ると良いですね…。